

Copyright 2013 © Redfoot Development. All rights reserved. Terms & Conditions

Robotics
We do a lot of things that would fall under the heading of “robotics.” This page currently has mostly software that is targeted at the FIRST Tech Challenge (FTC). Use this code as you see fit! But know that we provide no warranty as to its suitability for any particular thing. In other words, use it at your own risk! We use it ourselves. :-)
Holonomic Drives
These are very cool...
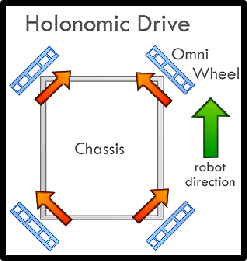
A holonomic drive is one that uses omni-directional wheels (omni-wheels) arranged in such a way to give the robot complete freedom of motion. The drive shown here is a four motor drive with the wheels positioned at right angles to each other. There are many other configurations of holonomic drives.
While these pages don’t tell you much about how to construct a holonomic drive, they do have a bunch of code suitable for an FTC robot using RobotC. Click HERE.
Setting Options
Advanced FTC stuff...

Have you ever found yourself in a situation where you’d like to be able to specify options for your autonomous or teleop program that you can set before the program runs? For example, let’s say you have an autonomous program that can approach a ramp from either side and you’d like to decide which side depending upon what your alliance partner can do? Sure, you could create multiple programs. But what if you have two or three sets of options that you’d like to set - do you create a dozen different programs??? NO!
Instead, you use this very cool option setting code. This code will allow you to set options for your program (autonomous or teleop) that get written into a file on the NXT. Your program can then easily read the options from the file and decide how to operate. And, “no”, you don’t have to write the code that reads from the file. We give you that too! Click HERE to get the code and see how to use it.
