

Copyright 2013 © Redfoot Development. All rights reserved. Terms & Conditions

Options
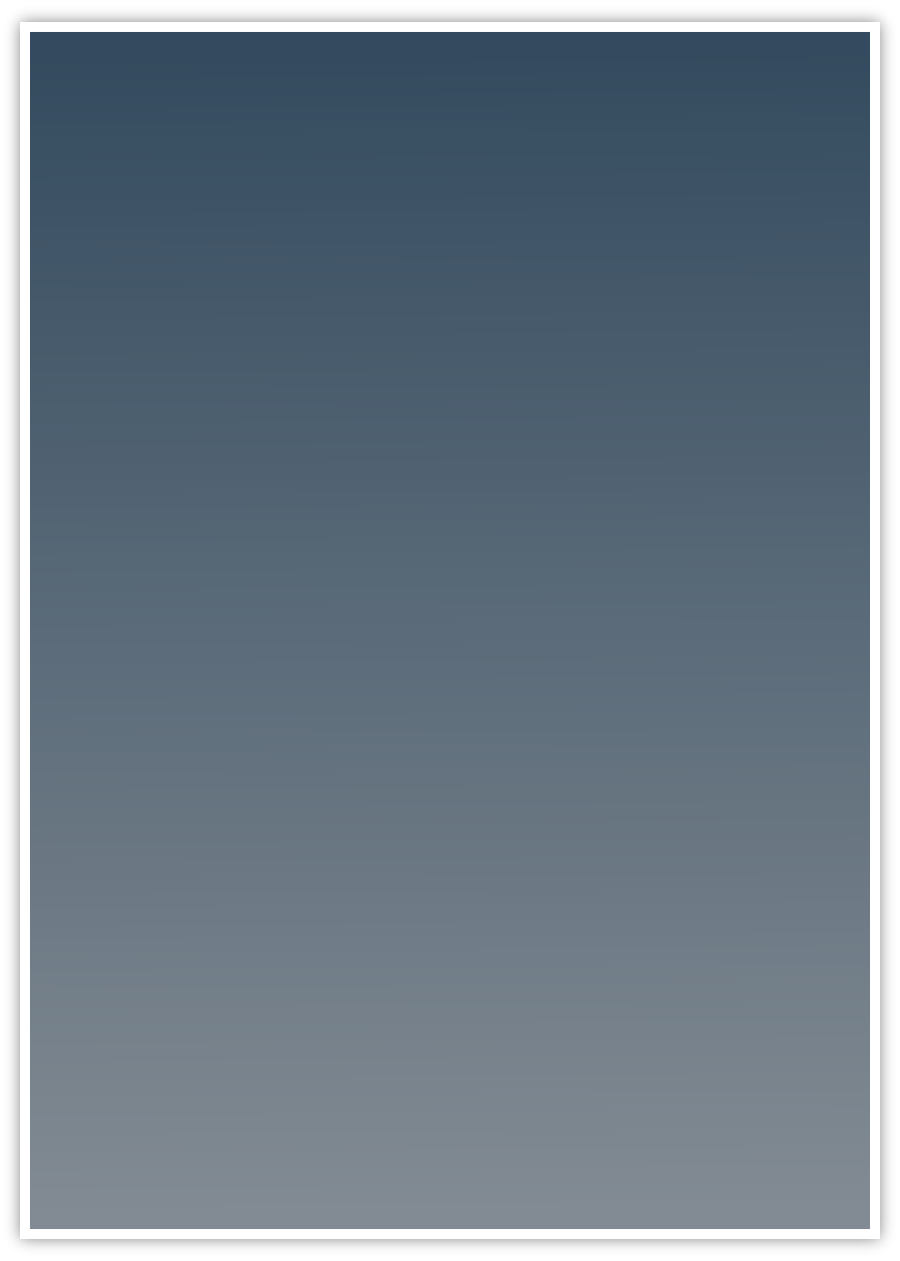
Remember the FTC challenge of 2012-2013 “Ring it Up?” In this challenge robots had to take rings from dispensers and place them on a peg-board in the middle of the field. The autonomous portion of the challenge was that the robot had to place a pre-loaded ring on the peg-board, and would get major extra points if the ring was placed in the column that had the IR sensor on it. This was a big challenge!

But one of more interesting parts of the challenge (assuming that you could place rings on the pegs in the first place) was cooperating with your alliance partner. If you both went after the same peg at the same time, both of you could miss scoring! Instead, if one of you either held-off for awhile, or maybe ignored the IR sensor and just went after a different peg, you could maximize your points. This is when “Options” was born.
Our team decided that we should create the capability to adjust a few things in our autonomous program right before the match started, after talking with our alliance partner. Here are the things we thought we needed to adjust:
- Target - whether we would target the IR column, avoid it, or go after a particular peg. If our alliance partner didn’t try to hang a ring on the IR column, we could go after it. But if our partner was good at placing a ring on an IR column peg, but couldn’t get out of the way after doing so, our program could explicitly avoid the IR beacon column. Or we could simply target a particular row and column for hanging the ring.
- Delay - how many seconds we would wait before trying to hang the ring on the target. This helped us avoid smashing into our alliance partner during autonomous.
We could have created a dozen different programs for all of these options and simply ran the one that made sense. But that’s really a stupid idea…it would take too long to create all of the different programs, take up too much memory, and be very prone to selecting the wrong program. So we used Options instead!
Setting Options
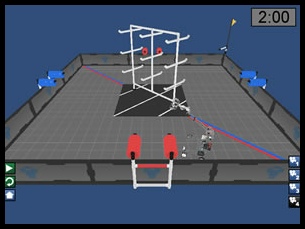
So here is what our options setting program looked like. We used it to:
- Turn on/off autonomous completely
- Set a wait between zero and 15 seconds
- Set whether we went after the IR beacon, avoided it, or went to a particular row/column
- Set the particular row and column
We ran the options setting program right before we started the autonomous program for the match. The program then wrote these options into a text file on the NXT, and when the autonomous program ran, it used the settings that were in the text file.
The cool thing about this options setting program is that it is completely configurable! You can easily customize it to specify your own options and set them.